
Slate Inspection
Key features
Improve product quality and cost efficiency
Camera and laser automation of labour-intensive task
Seamless integration into existing production process
Sorting of in/ out-of-specification slate
Technology improves UK competitiveness in global market

Increase efficiency in slate production
More than 2 million houses in the UK have a slate roof. Many of these were roofed before 1919 and need replacing every 30 years. Slate is a multi-million pound market and businesses involved depend on product quality and efficient production to compete.
Slate companies produce items every few seconds which have to be in specification. Slate is a natural material that can have differing thickness, width and length. It can also be chipped, have missing edges or be damaged in other ways. Although humans can easily detect these defects doing so is time-consuming and labour intensive. Creating automated systems that use robotics to remove defective items saves time and increases project efficiency.

State-of-the-art lasers and imaging
OMS built a system involving complex machine vision and non-contact sensing. We used shadow imagery and laser distance measurement to provide the necessary sensing for real-time quality control.
A typical short-range laser sensor can measure a distance accurately several thousand times per second. Top quality cameras can take an image far faster than the human eye can blink. Combining these two sensors with appropriate lighting meant our system could check a slate in less than a second and communicate a reject to the robotic handling system.
Determining slate thickness
Each slate’s thickness had to be measured in several places. As slate is a natural product that has been cleaved apart there is always a certain amount of variation in thickness but if it is too thick it will not easily “mate” with another slate on a roof, leaving gaps. If it is too thin the slate may fall early and may not match with the others to the required extent.
Linking to the production process
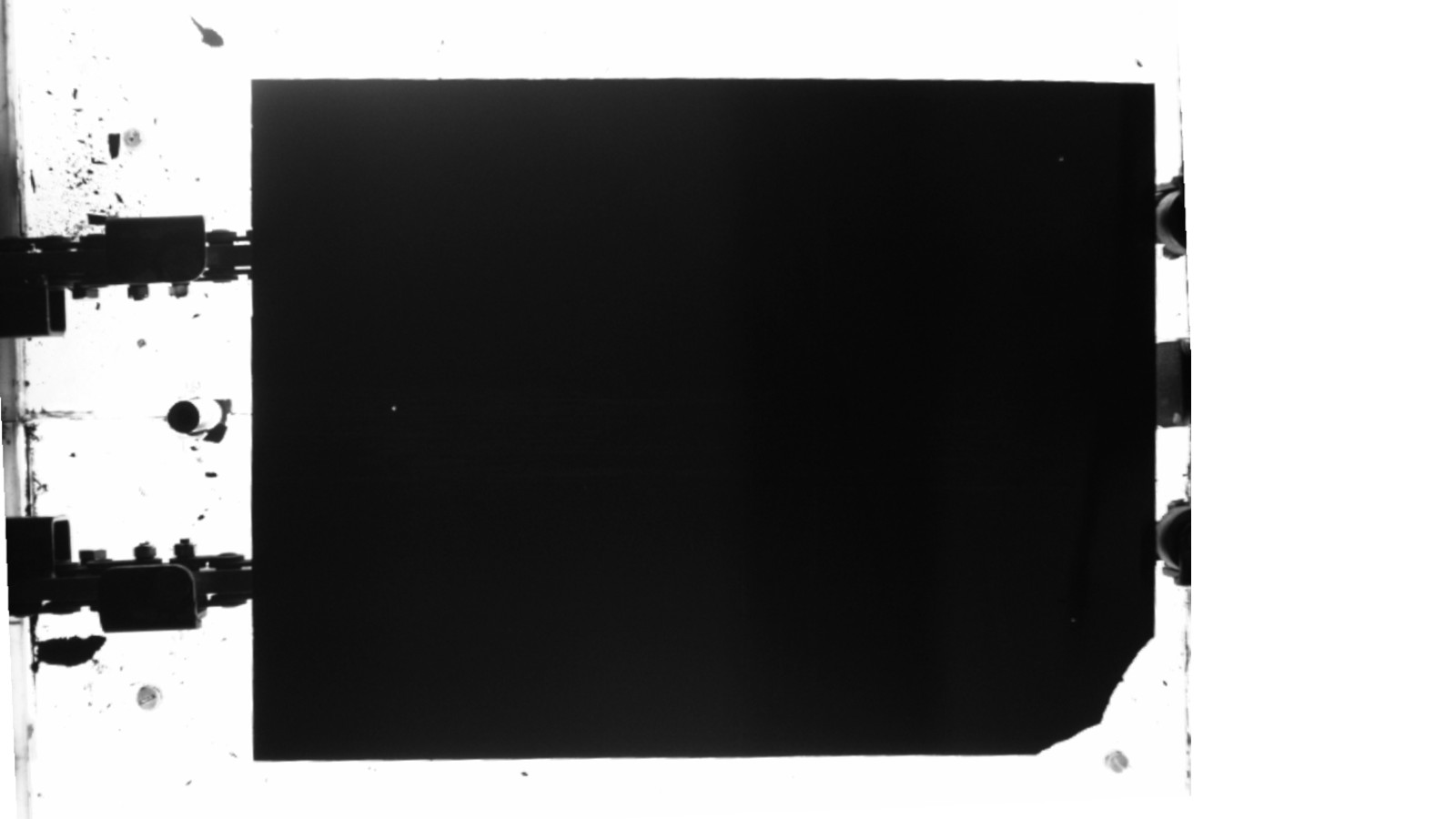
OMS rested the slate on three supports with the lasers mounted above. The lasers determined whether the slate was within acceptable specifications and what its average thickness was. We used a camera capable of checking several aspects of the slate’s shape. Width and length had to be within certain boundaries and the slate had to be sorted on the fly. Any missing areas had to be identified, measured and, if out-of-specification, rejected. The following images illustrate both situations.
The system had to link to the production process (see below) in such a way that in the fraction of time it was in position an image could be taken of the slate silhouetted against the bright background. Image processing than had to remove any extraneous or unimportant features, compute the slate’s dimensions and detect any damaged areas. The pass/ fail decision had to link to other dimensional measurement data to control the sorting process effectively.
Improved competitiveness
The project result was a system that improved UK slate manufacturing efficiency, enabling a locally produced natural product to remain competitive in a global market. A good outcome for the UK economy and for the environment.

Production setting
The outcome of the project was a system that assisted in the process of efficiently manufacturing slate in the UK to enable a locally produced natural product to remain competitive in a global market which is good for the UK economy and better from an ecological standpoint.