Pipe Corrosion and Defect Inspection
Key features
High accuracy dimensional analysis for critical sections
Medium to long range (0 - 1 km) robotic laser and camera crawler
Determine wall thickness loss in hard to reach locations
Full data management with proprietary point cloud software
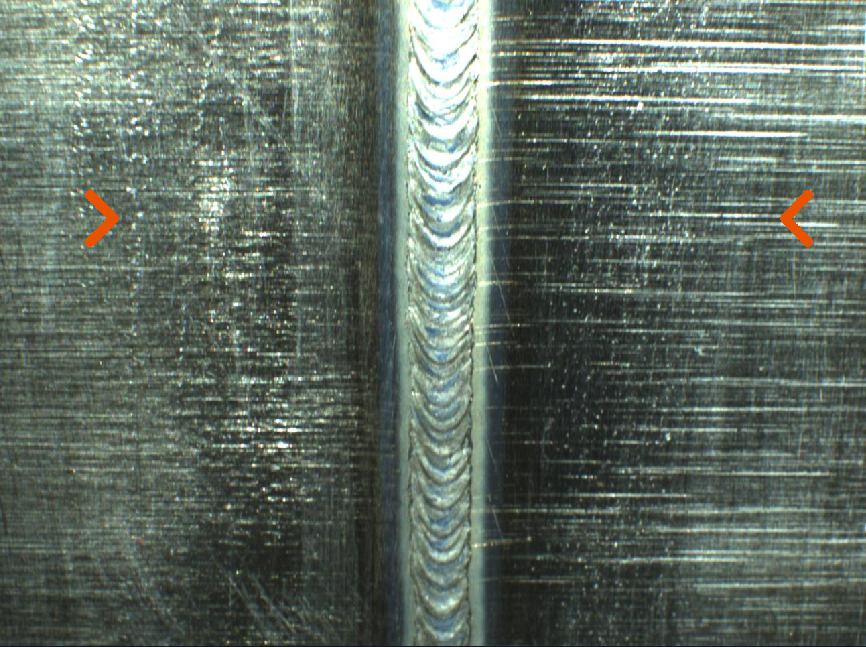
Conventional internal root pass weld scanning
Calibrated and verified systems
Improved pipeline integrity

Map internal corrosion accurately
Internal pipe corrosion is difficult to detect, even with the best available ultrasonic techniques, and can cause critical problems in pipelines. OMS inspection systems accurately map internal corrosion, helping oil and gas companies reduce their costs, improve safety and extend pipeline lifetime. Our solution maps internal corrosion sites, using sensors and delivery mechanisms perfectly adapted for the task.

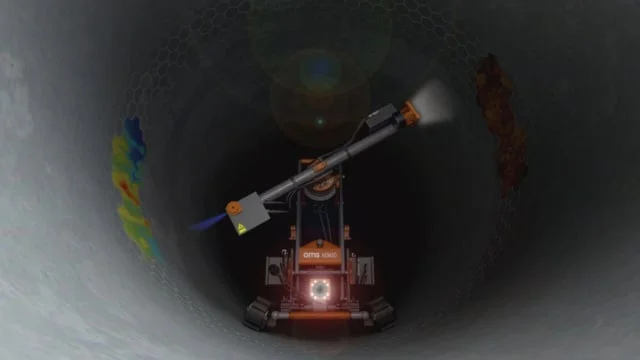
Camera and laser inspection
The AUGA.nomad system enters through a small aperture and expands when it reaches the optimal surveying location.
The system acquires data via stripe laser on a rotating head with a radial accuracy of ± 50µm or ± 100 µm
OMS proprietary point cloud software analyses single scans or multiple scans collected and stitched together
Camera images collected simultaneously for separate analysis and RGB overlay
Technique can also assess welds and internal pipe features such as liner wrinkling